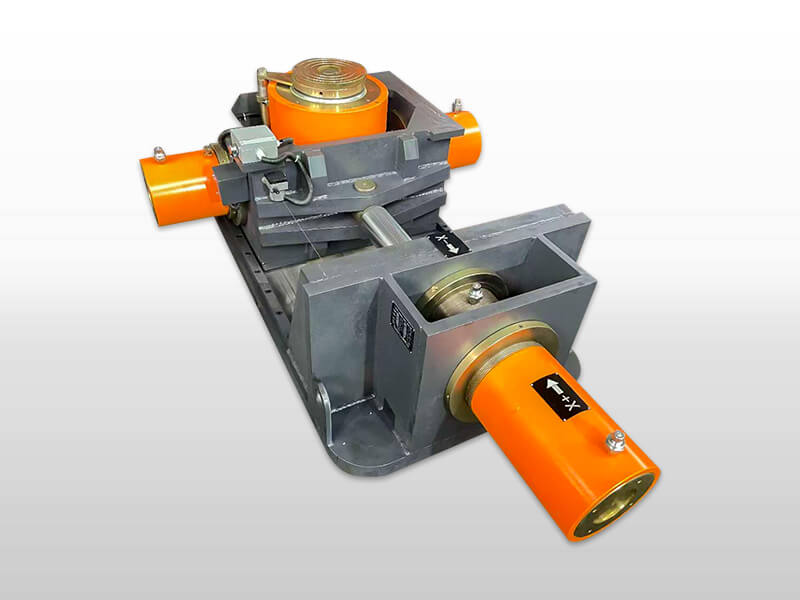
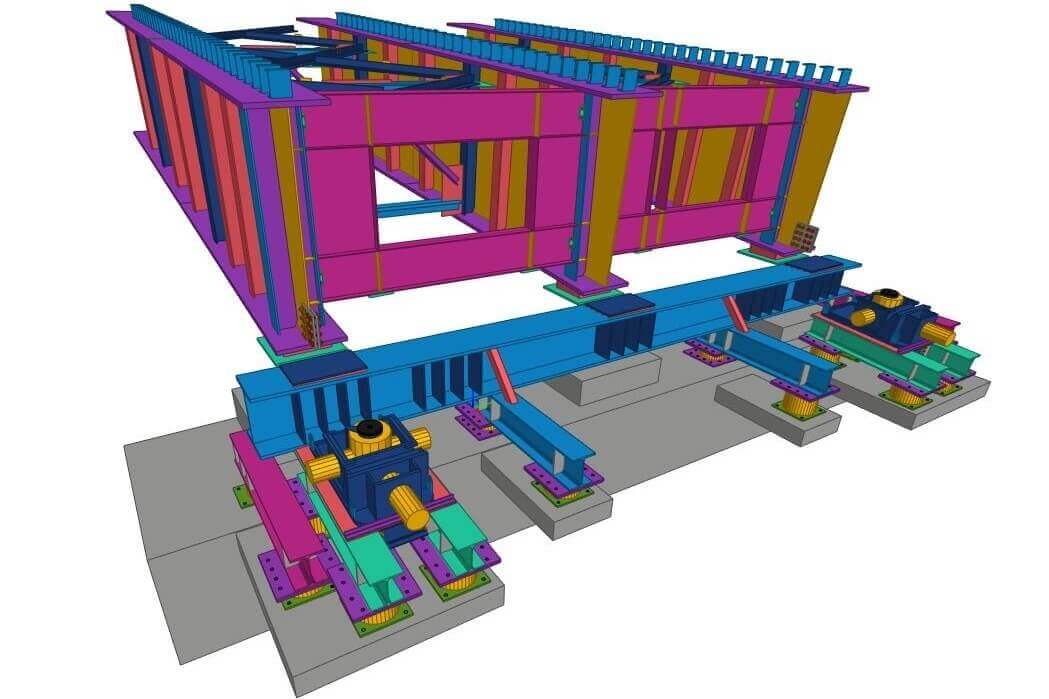
1. A master control system controls multiple jacking equipment in three directions, and can automatically and manually complete vertical lifting, longitudinal horizontal jacking and lateral deviation correction synchronous work.
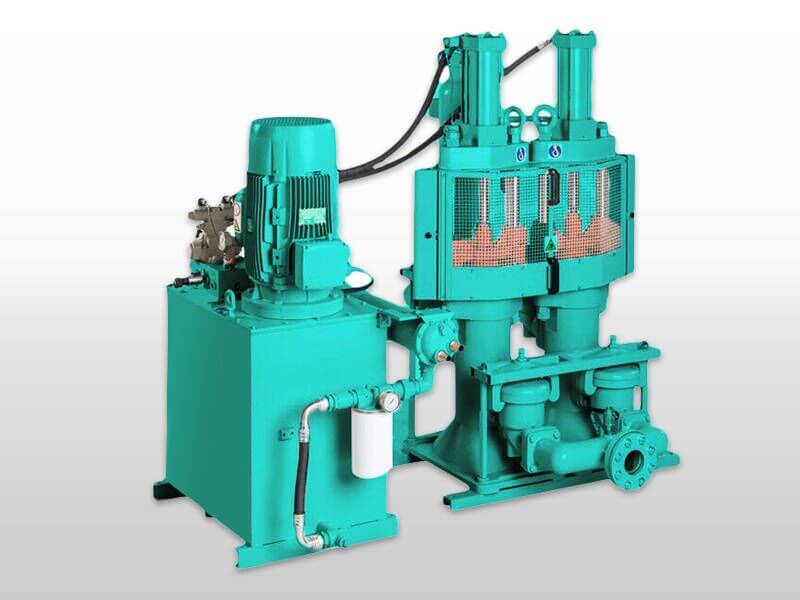
2. Using sensor technology, combined with PLC control technology, frequency conversion technology and computer software, precise control of displacement and synchronization is achieved.
3. Using force and displacement synchronous dual control, real-time deviation correction of the jacking process is achieved to ensure the slope of the steel beam and the line shape of the entire bridge.
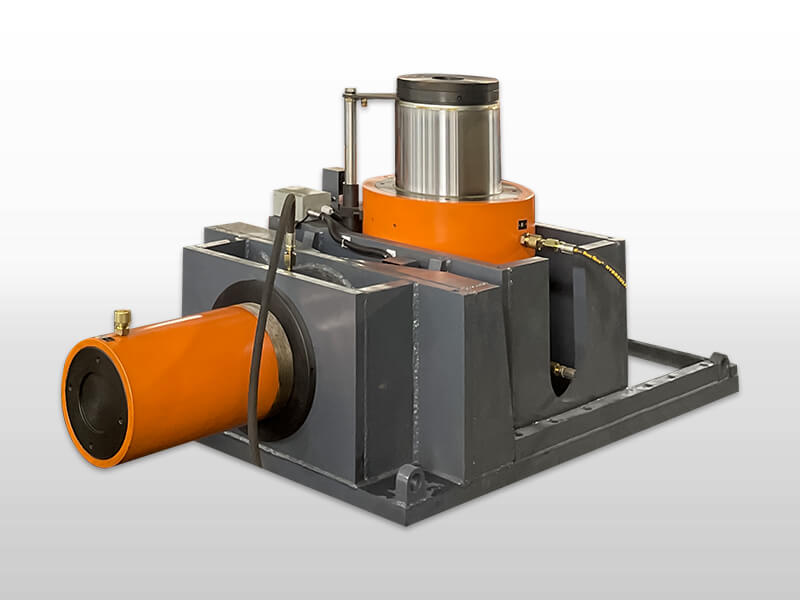
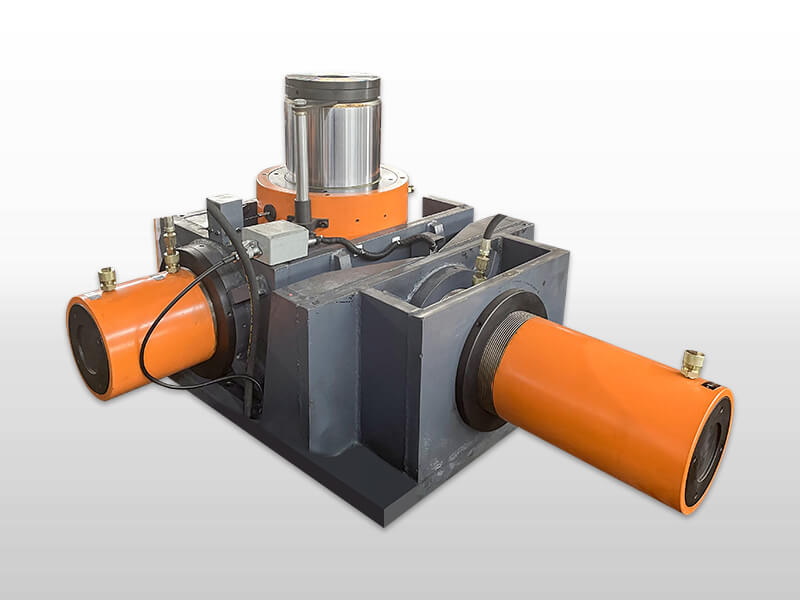
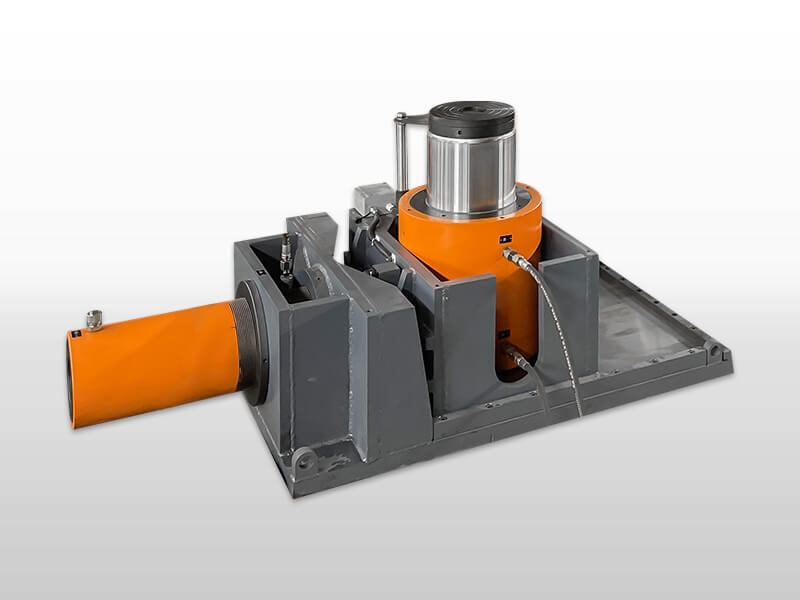
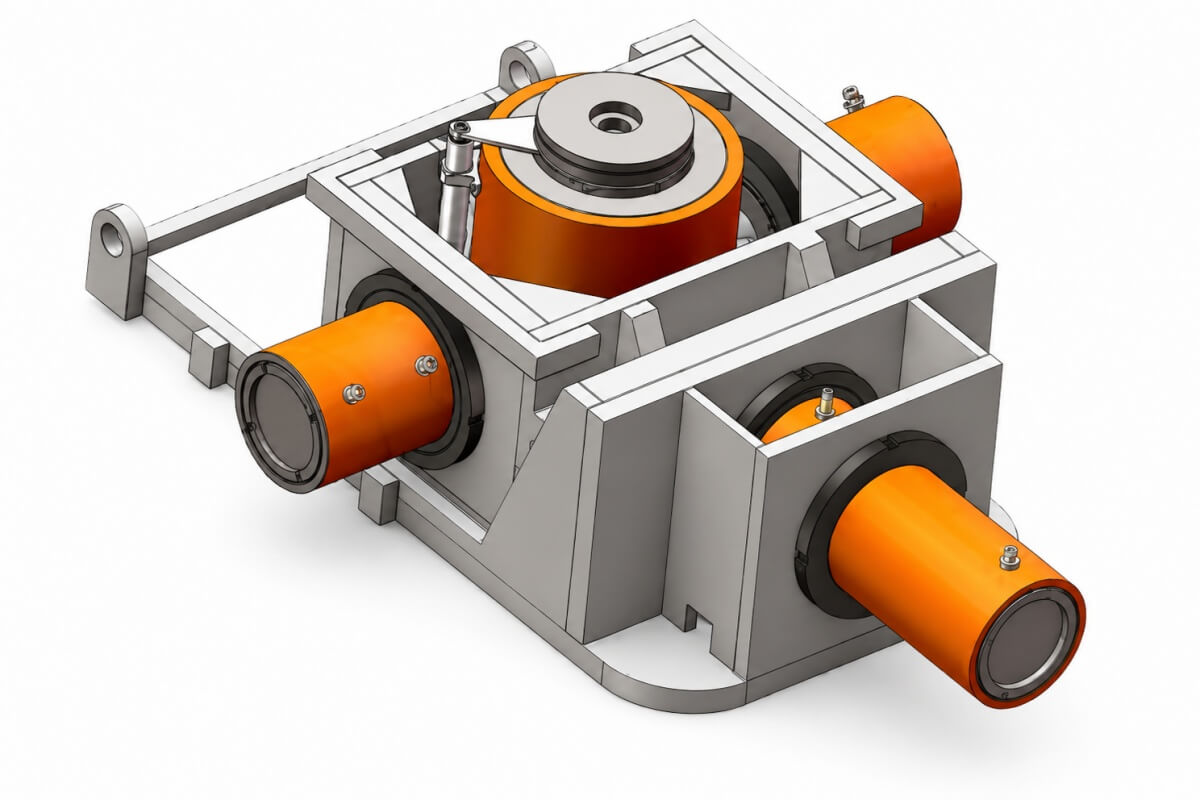
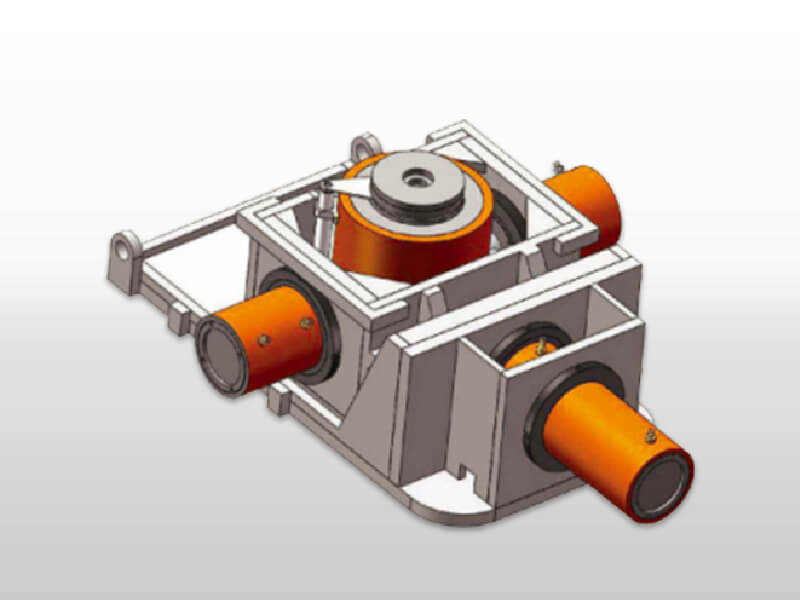
4. The designed double-top structure for correction can ensure that when the correction cylinder moves, it will not generate lateral force on the cylinders in other directions. The spherical plate structure designed for the main top is conducive to centering and leveling during jacking.
5. Real-time display of monitoring parameters such as displacement and pressure of each jacking point, as well as the operating status of the oil pump and solenoid valve, and feedback control.
6. The sliding amplitude composed of special materials has a static friction coefficient of 0.06 and a dynamic friction coefficient of 0.03.
7. The modular design of the jacking and jacking structure reduces the workload of on-site pipeline connection and reduces the risk of system use.
8. The system structure is simple, the working space is small, and the cost is low.
9. Intelligent data management; over-limit alarm, safe and reliable.












 Email:info@gaodetec.com
Email:info@gaodetec.com 

















.jpg)

.jpg)






.jpg)